

Midlertidig information
Informationen på siden er ikke specielt god endnu ...
Jeg er i øjeblikket ved at forbedre denne side og andre sider om elektriske dele på køretøjer med elektrisk motor.
Du kan hjælpe ved at deltage i forumemnet Opdatering af sider under "Elektriske dele på køretøjer med elektrisk motor".
Jeg er i øjeblikket ved at forbedre denne side og andre sider om elektriske dele på køretøjer med elektrisk motor.
Du kan hjælpe ved at deltage i forumemnet Opdatering af sider under "Elektriske dele på køretøjer med elektrisk motor".
Introduktion
På de mere avancerede elektriske køretøjer er dele såsom instrumentpanel, controller, batteri og oplader i stand til at kommunikere.
Instrumentpanelet kan ved at kommunikere med batteriet vise præcis information om batteriets opladningsniveau (SoC).
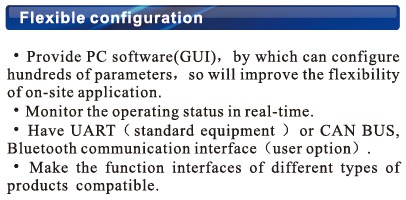
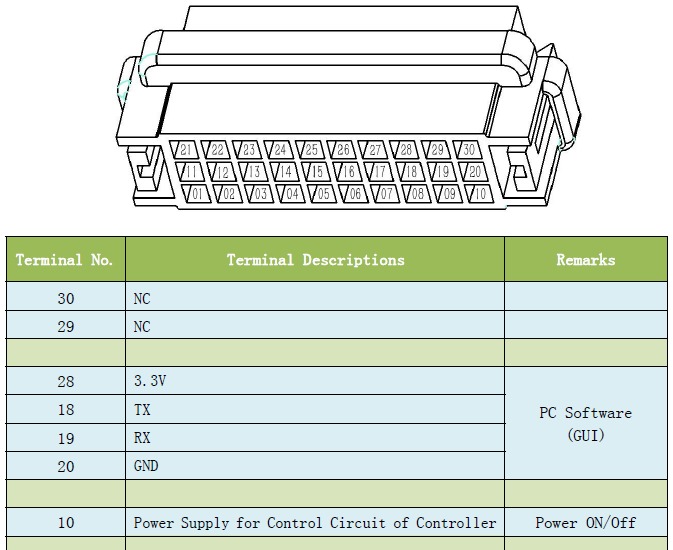
Controlleren kan tilsluttes en computer (seriel/USB) eller en telefon (Bluetooth) for at overvåge tilstanden og indstille parametre.
Batteriet kan tilsluttes en håndholdt computer for at diagnosticere uden at skulle skille batteriet ad.
Opladeren kan formodentligt overvåge opladningen og vise information såsom opladningsniveau (SoC) og tilbageværende tid.
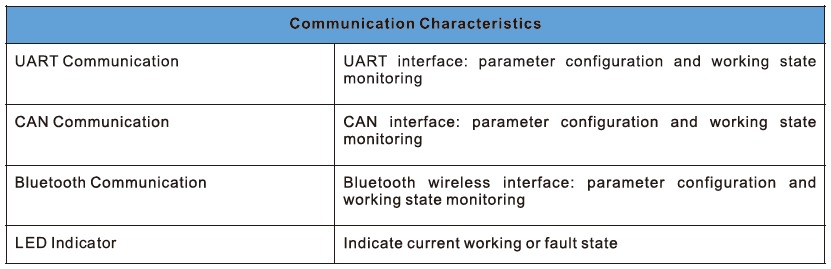
Kommunikationen kan ske med noget som kaldes UART (RS-232, RS-485) og CAN.
Instrumentpanelet kan ved at kommunikere med batteriet vise præcis information om batteriets opladningsniveau (SoC).
Controlleren kan tilsluttes en computer (seriel/USB) eller en telefon (Bluetooth) for at overvåge tilstanden og indstille parametre.
Batteriet kan tilsluttes en håndholdt computer for at diagnosticere uden at skulle skille batteriet ad.
Opladeren kan formodentligt overvåge opladningen og vise information såsom opladningsniveau (SoC) og tilbageværende tid.
Kommunikationen kan ske med noget som kaldes UART (RS-232, RS-485) og CAN.
Billeder af instrumentpanel
Her ses nogle eksempler på instrumentpaneler hvor displayet er i stand til at vise information om opladningsniveau og rækkevidde.
Der står dog ikke at informationen stammer fra batteriets SoC-data men det tænker jeg det gør når der også oplyses rækkevidde (RAN/RANGE) på displayet.

RAN 56 km
RANGE 55
RANGE 55
Der står dog ikke at informationen stammer fra batteriets SoC-data men det tænker jeg det gør når der også oplyses rækkevidde (RAN/RANGE) på displayet.

RAN 56 km

RANGE 55

RANGE 55
Billeder om kommunikation med controller

LMBC GUI
VGA Vax
VGA Vax

LMBC GUI

PMSM Controller
Uart convert USB to PC
UART TXD UART RXD GND Communication Inputs/Outpus
Uart convert USB to PC
UART TXD UART RXD GND Communication Inputs/Outpus
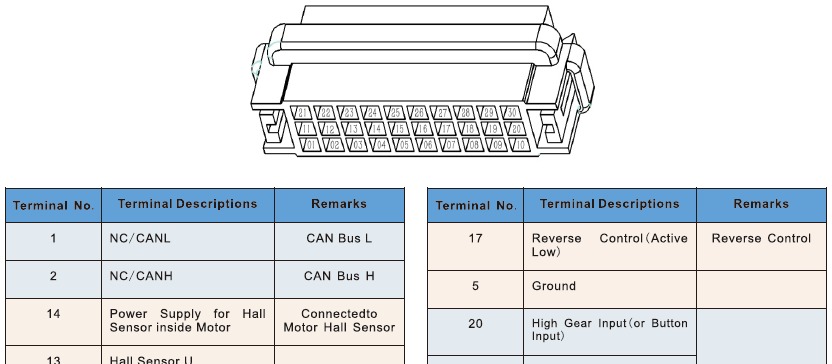
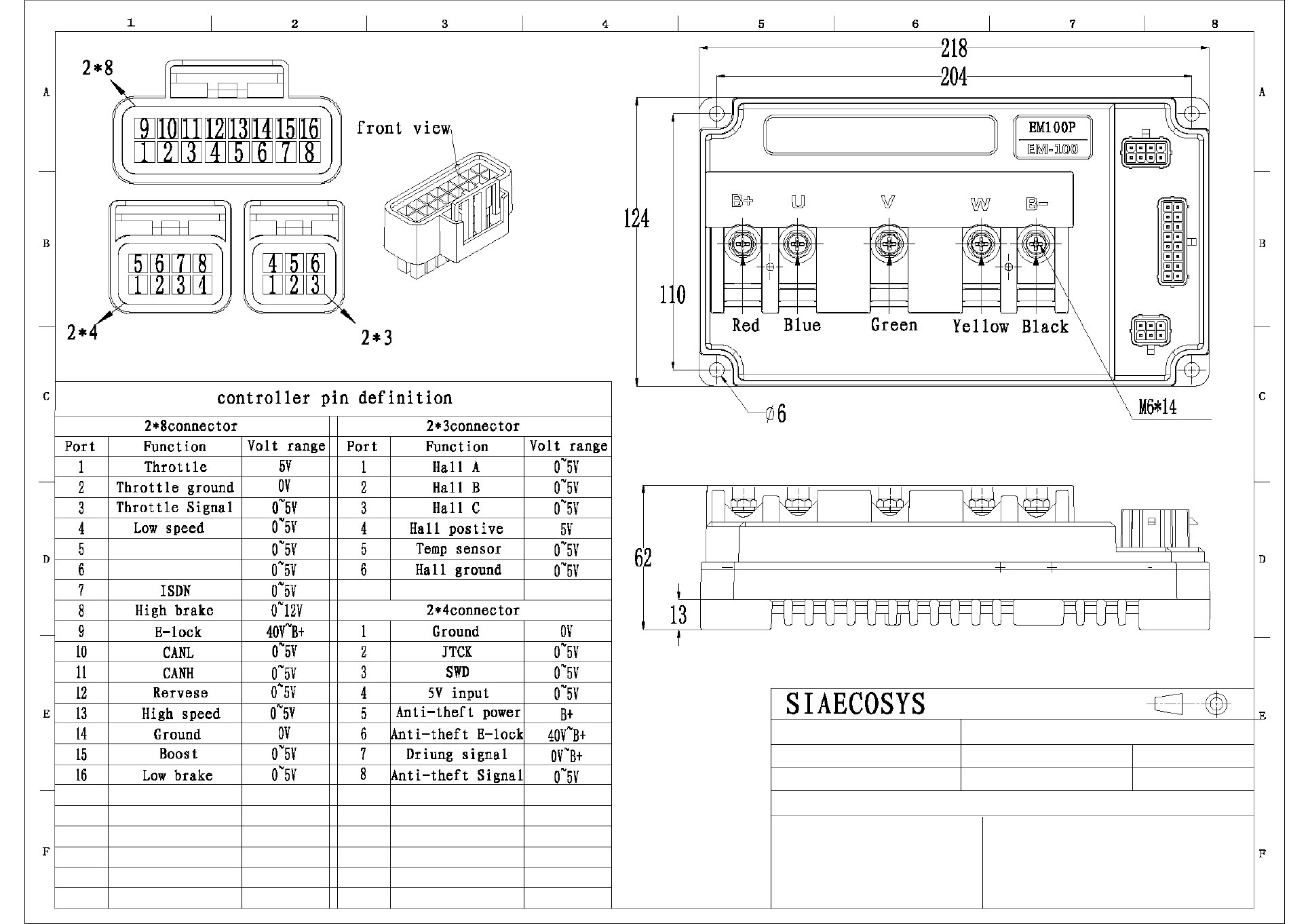

485-A og 485-B markeret
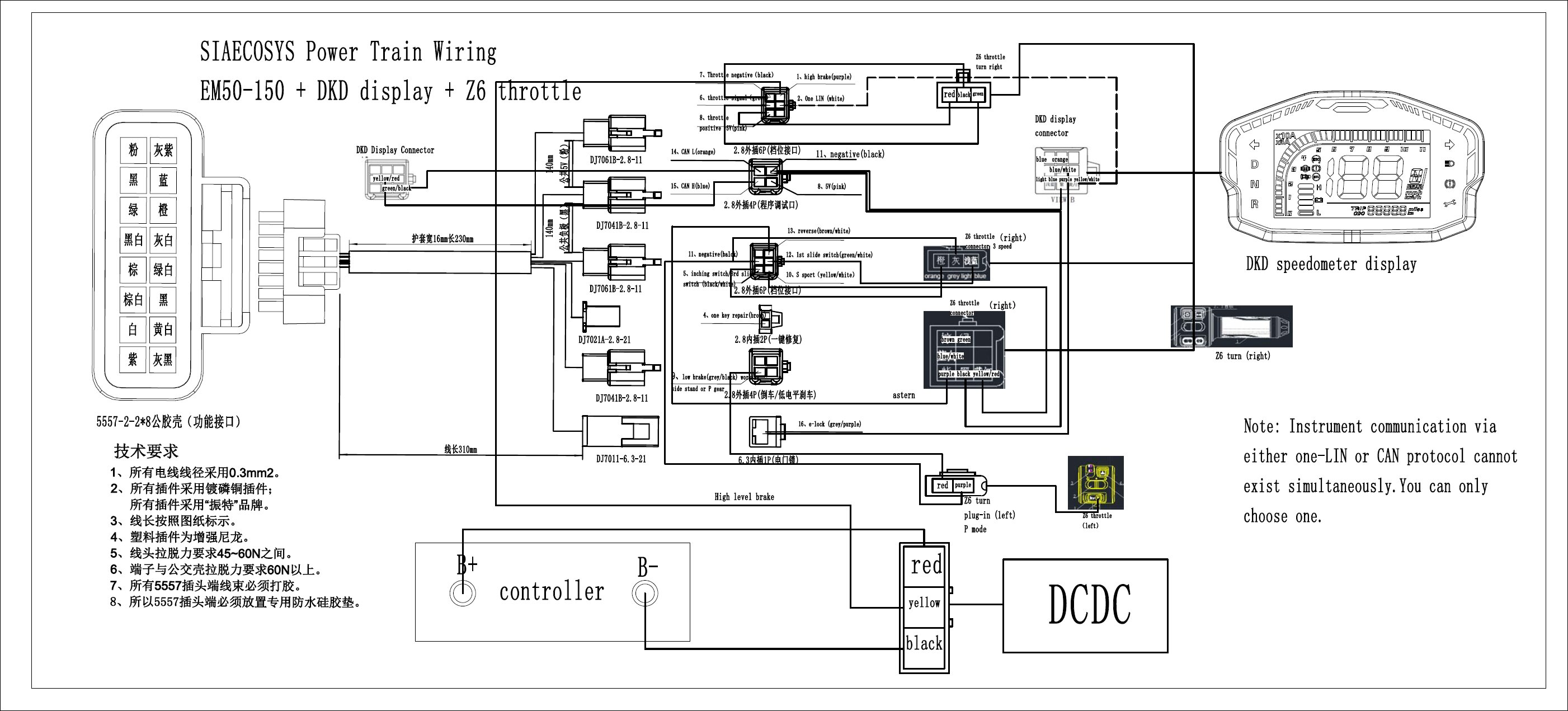
Eldiagram
Yadea G5
Eldiagram
Yadea G5
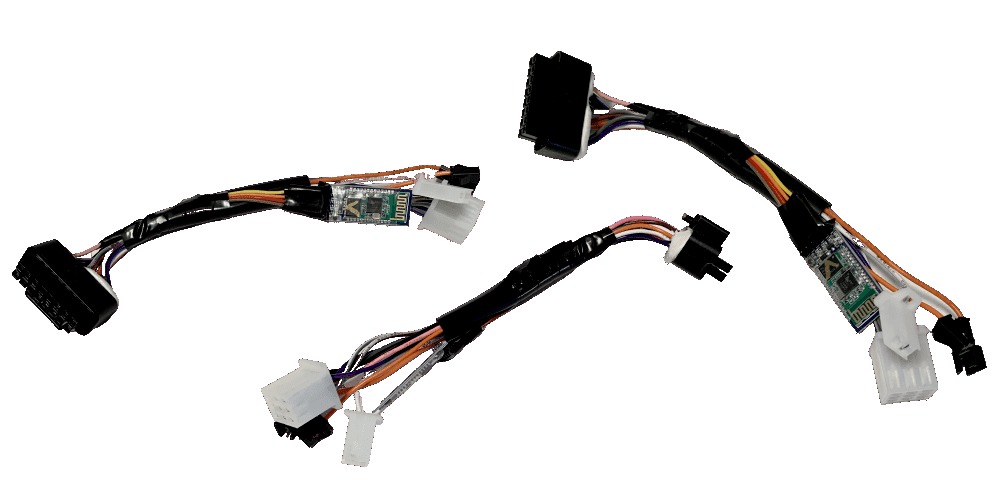
Billeder om kommunikation med controller med Bluetooth-enhed
Der kan tilsluttes en Bluetooth-enhed på controlleren så den kan indstilles trådløst f.eks. med software på en telefon.



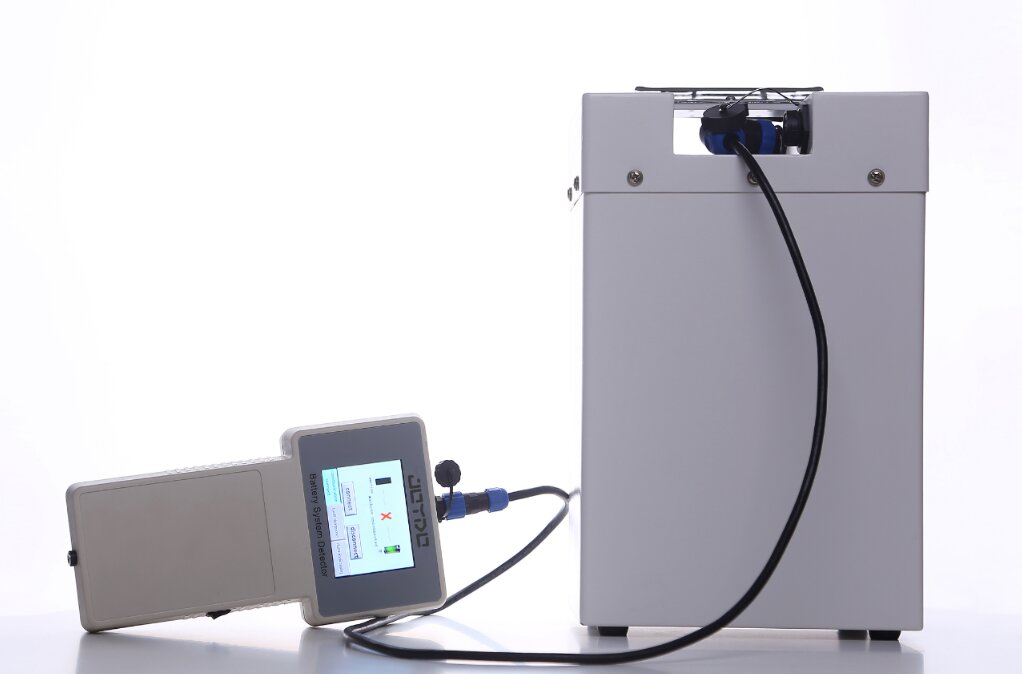
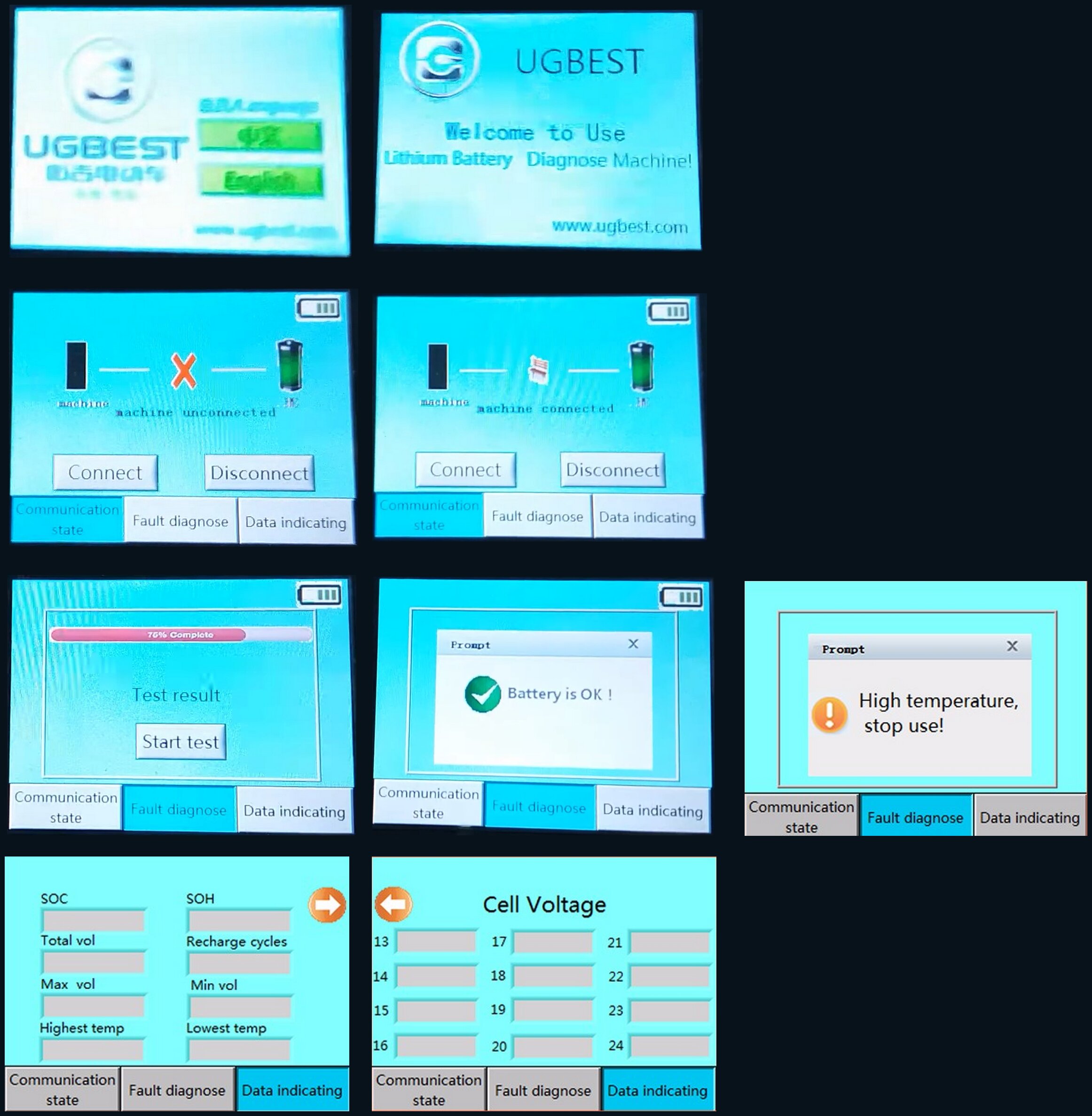
Billeder af værktøj til kommunikation med batteri
Se også forumemnerne UGBEST-værksted og BMS JOYDO 13S-P (VGA Vax).
Til nogle batterier findes værktøj som kan tilsluttes batteriet.
Så kan man f.eks. få oplysninger om fejl og følgende data:
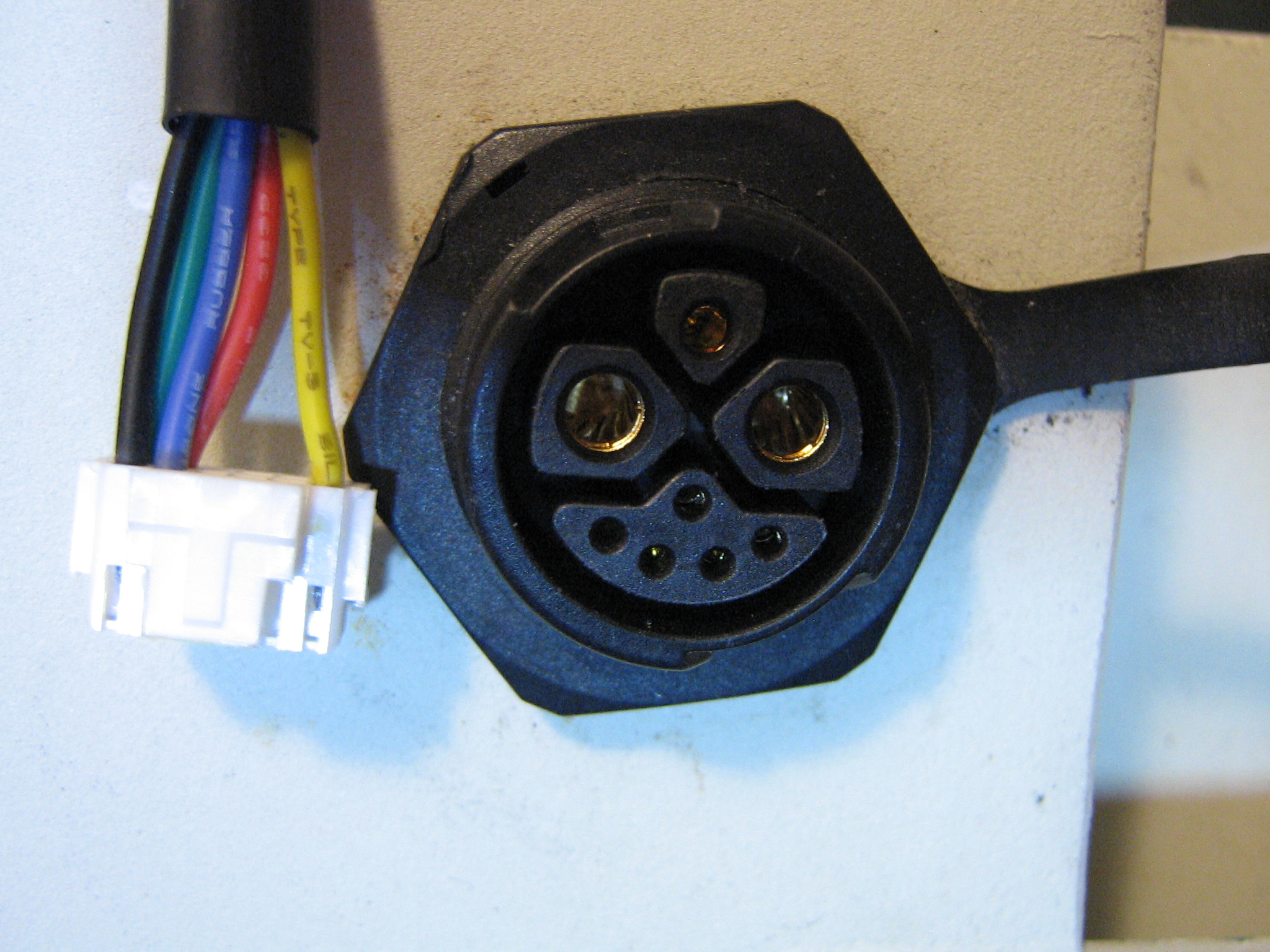
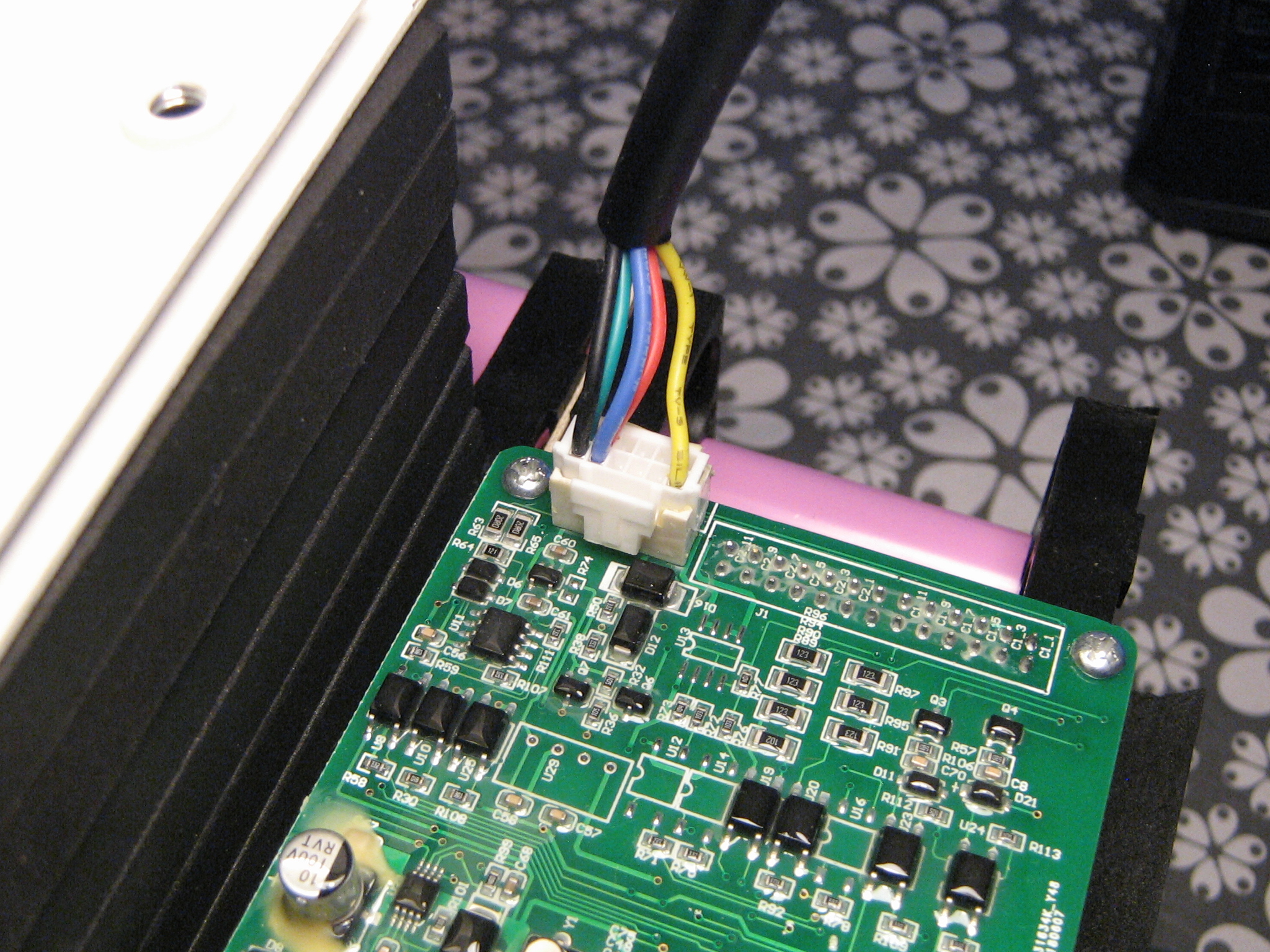
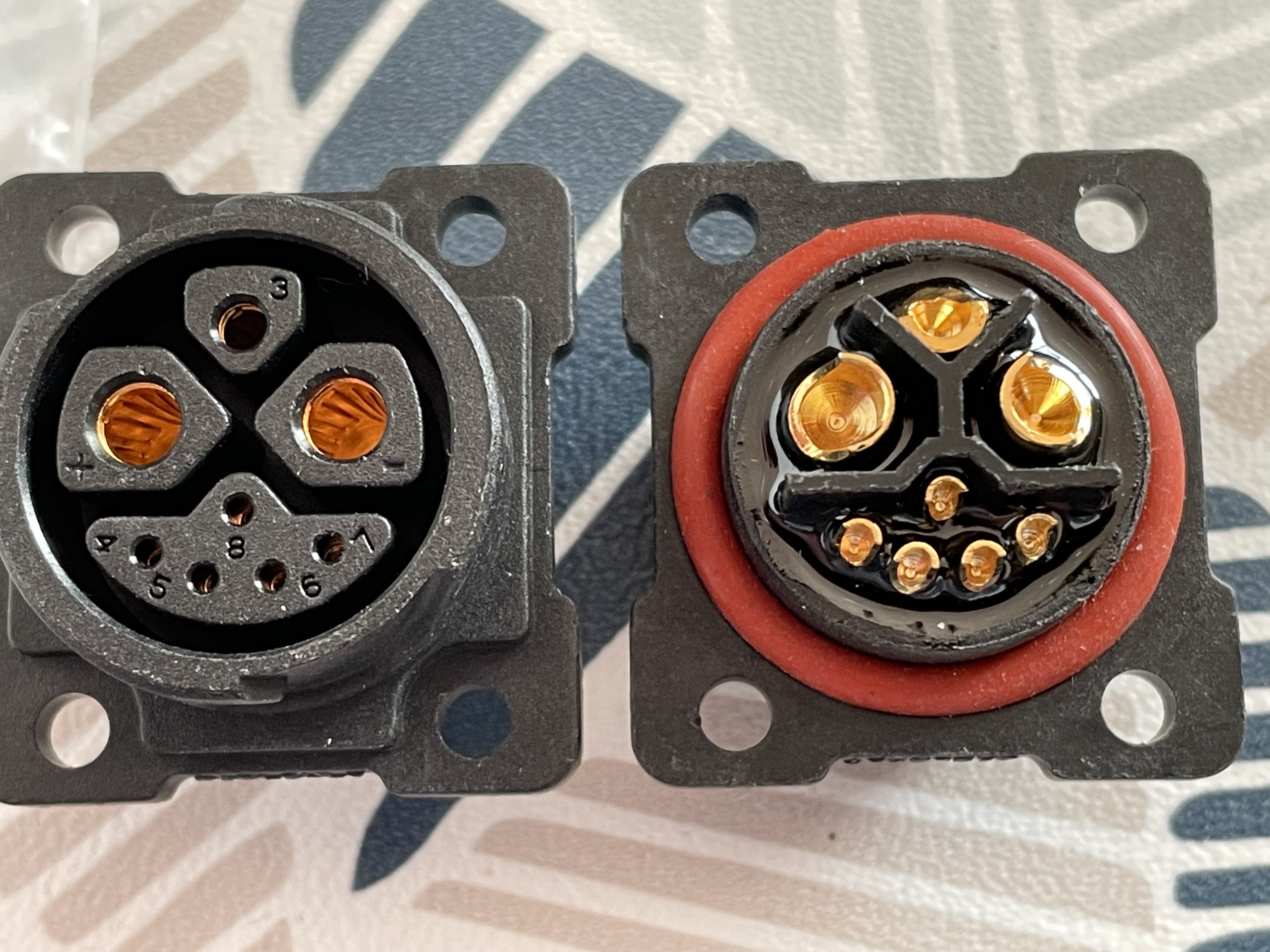
F.eks. JOYDO Battery System Detector der tilsluttes Chogori-stikket (som også kan bruges til opladning og afladning).
Fire af de små huller bruges til at give strøm til BMS'en og til kommunikation. Med RS-485.
Chogori-stikkets:
Hul 4: sort ledning GND12 (Communication place)
Hul 5: grøn ledning B (RS485 interface B)
Hul 6: blå ledning A (RS485 interface A)
Hul 7: rød ledning +12V (Communication input +5V~12V)
Man giver åbenbart BMS'en ekstern strøm på 4 og 7 og så sker kommunikationen på 5 og 6.





Til nogle batterier findes værktøj som kan tilsluttes batteriet.
Så kan man f.eks. få oplysninger om fejl og følgende data:
SOC (State Of Charge)
SOH (State Of Health)
Total vol (måske kapaciteten)
Recharge cycles (måske antal opladninger)
Max vol (måske højeste kapacitet)
Min vol (måske laveste kapacitet)
Highest temp (højeste temperatur)
Lowest temp (laveste temperatur)
Cell voltage (måske spænding af hver celleserie)
SOH (State Of Health)
Total vol (måske kapaciteten)
Recharge cycles (måske antal opladninger)
Max vol (måske højeste kapacitet)
Min vol (måske laveste kapacitet)
Highest temp (højeste temperatur)
Lowest temp (laveste temperatur)
Cell voltage (måske spænding af hver celleserie)
F.eks. JOYDO Battery System Detector der tilsluttes Chogori-stikket (som også kan bruges til opladning og afladning).
Fire af de små huller bruges til at give strøm til BMS'en og til kommunikation. Med RS-485.
Chogori-stikkets:
Hul 4: sort ledning GND12 (Communication place)
Hul 5: grøn ledning B (RS485 interface B)
Hul 6: blå ledning A (RS485 interface A)
Hul 7: rød ledning +12V (Communication input +5V~12V)
Man giver åbenbart BMS'en ekstern strøm på 4 og 7 og så sker kommunikationen på 5 og 6.
Oplader med kommunikation
Jeg har vist ikke set nogle opladere der følger med til elektriske scootere som kan kommunikere med batteriet men det er en mulighed.
Der kan f.eks. være et display på opladeren som kan vise opladningsniveau (SoC) og tilbageværende tid.
Opldere der kan vise det kommunikere muligvis med batteriet.
")
Der kan f.eks. være et display på opladeren som kan vise opladningsniveau (SoC) og tilbageværende tid.
Opldere der kan vise det kommunikere muligvis med batteriet.
")
XT30 BATTERY CHARGER
OLED (V A Hour SOC)
OLED (V A Hour SOC)
Kommunikationsformer
Jeg har ikke helt styr på det men ...
UART (RS-232, RS-485, TTL)
CAN bus
UART (RS-232, RS-485, TTL)
CAN bus
Kommunikation via UART
Ledninger kan angives med:
RX (eller RXD)
TX (eller TXD)
Til kommunikation kan f.eks. være brugt en standard som kaldes RS-232 eller RS-485.
Kommunikation via RS-485:
I eldiagrammet til køretøjet kan f.eks. ses to ledninger kaldet 485-A og 485-B.
Universal Asynchronous Receiver-Transmitter.
RS er en forkortelse af Recommended Standard.
RX (eller RXD)
TX (eller TXD)
Til kommunikation kan f.eks. være brugt en standard som kaldes RS-232 eller RS-485.
Kommunikation via RS-485:
I eldiagrammet til køretøjet kan f.eks. ses to ledninger kaldet 485-A og 485-B.
Universal Asynchronous Receiver-Transmitter.
RS er en forkortelse af Recommended Standard.
Kommunikation via CAN bus
Jeg ved ikke meget om det men der findes noget til kommunikation som kaldes CAN bus.
Der er åbenbart to signaler (2 ledninger) kaldet:
CANH (H står for HIGH)
CANL (L står for LOW)
CAN er en forkortelse af Controller Area Network.
CAN bus.
Der er åbenbart to signaler (2 ledninger) kaldet:
CANH (H står for HIGH)
CANL (L står for LOW)
CAN er en forkortelse af Controller Area Network.
CAN bus.
Kommunikation via one-wire
Der er noget som kaldes one-wire.
Jeg ved ikke helt hvad det er.
Men muligvis kommunikation over kun én ledning (og så stel vel).
Jeg ved ikke helt hvad det er.
Men muligvis kommunikation over kun én ledning (og så stel vel).
Forumemner
Se også forumemnerne Filer til LingBo-controller og andet, Filer til VOTOL-controller og USB-til-seriel.