

Midlertidig information
Informationen på siden er ikke specielt god endnu ...
Jeg er i øjeblikket ved at forbedre denne side og andre sider om elektriske dele på køretøjer med elektrisk motor.
Du kan hjælpe ved at deltage i forumemnet Opdatering af sider under "Elektriske dele på køretøjer med elektrisk motor".
Jeg er i øjeblikket ved at forbedre denne side og andre sider om elektriske dele på køretøjer med elektrisk motor.
Du kan hjælpe ved at deltage i forumemnet Opdatering af sider under "Elektriske dele på køretøjer med elektrisk motor".
Introduktion
Elektriske køretøjer kan have én eller flere motorer.
På mange af de nyere to-hjulet elektriske scootere sidder der en børsteløs navmotor i baghjulet uden transmission.
På mange af de nyere tre-hjulet elektriske kabinescootere sidder der en børsteløs motor med reduktionsgear og differentiale på en bagaksel.
Hvis motoren er indbygget i hjulet kaldes det for en navmotor.
Et elektrisk køretøj med navmotor uden transmission er meget stille.
Motoren kan også sidde væk fra hjulet og kraften overføres med tandrem, kæde eller reduktionsgear/differentiale.
Det kaldes muligvis for centerplaceret motor.
De findes elektriske scootere med mere end én motor. F.eks. to-hjulet elektrisk scooter med motor i både for og baghjul. Eller tre-hjulet elektrisk kabinescooter med motor i begge baghjul.
På mange af de nyere to-hjulet elektriske scootere sidder der en børsteløs navmotor i baghjulet uden transmission.
På mange af de nyere tre-hjulet elektriske kabinescootere sidder der en børsteløs motor med reduktionsgear og differentiale på en bagaksel.
Hvis motoren er indbygget i hjulet kaldes det for en navmotor.
På engelsk kaldes navmotor for "hub motor".
Et elektrisk køretøj med navmotor uden transmission er meget stille.
Motoren kan også sidde væk fra hjulet og kraften overføres med tandrem, kæde eller reduktionsgear/differentiale.
Det kaldes muligvis for centerplaceret motor.
De findes elektriske scootere med mere end én motor. F.eks. to-hjulet elektrisk scooter med motor i både for og baghjul. Eller tre-hjulet elektrisk kabinescooter med motor i begge baghjul.
Motortyper
Navmotor
Centerplaceret motor
Motor med kulbørster
Motor uden kulbørster
AC Asynchronous
Permanent Magnet Synchronous
Billeder af navmotor

ZN60V3000W

ZN60V3000W

500 watt
NKT Motor Milka
NKT Motor Milka

500 watt
NKT Motor Milka
NKT Motor Milka

UG48V2000WH75BB066
VGA Vax
VGA Vax

VGA Vax

VGA Vax

Bosch 12ZW06058052YA M150000049
VGA e-Fox
VGA e-Fox
")
VGA Vax (stor knallert)

JinYuXing C35G JYX481000-2008005728
Goccia GEV1000
Goccia GEV1000

JinYuXing C35G JYX481000-2008005728
Goccia GEV1000
Goccia GEV1000

VGA CabEasy Exclusive

VGA CabEasy Exclusive

Giantco e-Buddy motor i baghjul bagbremse dæk

Giantco e-Buddy motor
Motordæksel:



Billeder af køretøjer med navmotor

Yadea C-line

Yadea C-line

Bosch 10ZW6065317 HA000042
Lifan E3
Lifan E3

Yamaha

MV EM3

Bosch ZN60V3000K9100237
MotoCR E-Libra
MotoCR E-Libra

Hecht Citis

Hecht Citis

Coopop SPW2104CE...
Coopop
Coopop

ABAT
Busetto ECC800
Busetto ECC800

Citycoco


Bosch ZN60V2000WK9C00379



E-Ron EV Sport

E-Ron EV Sport

E-Ron EV Sport

MEIJS Motorman

UGBEST LB48V800WG7BA3117
VGA Vax
VGA Vax

VGA Vax
")
VGA Vax (stor knallert)

Skyteam E-Mini

Super Soco CUx

VGA e-Fox

VGA e-Fox

Virto

72 volt 1500 watt
Yingang E-monster
Yingang E-monster

36 volt 250 watt
Stigo
Stigo

GoEazy Play WTT5000P

HHJ30NT36V190921460 D
Huanxi X7 WTT0147R
Huanxi X7 WTT0147R

HF36V1809161696
GoEazy WTT1000P
GoEazy WTT1000P
 600 watt (maksimal) Niu KQi3")
300 watt (nominel) 600 watt (maksimal)
Niu KQi3
Niu KQi3

Motor i både for- og baghjul
UBCO 2X2 Adventure Bike
UBCO 2X2 Adventure Bike

MGB Delivery

e-max motor

e-max motor

e-max motor

Yamaha YIPU AC Synchronous motor
Yamaha EC-03 bag sol og planet gear
Yamaha EC-03 bag sol og planet gear

Yamaha YIPU AC Synchronous motor
Yamaha EC-03 motor gennemskåret sol og planet gear
Yamaha EC-03 motor gennemskåret sol og planet gear

Elektrisk navmotor

Elektrisk navmotor

Elektrisk navmotor
Swei SWD152048 500-800W 48V jinhau shiwei electromechanical co Ltd.
Swei SWD152048 500-800W 48V jinhau shiwei electromechanical co Ltd.

Elektrisk navmotor
EVT 4000e
EVT 4000e

Elektrisk navmotor
EVT 4000e stik
EVT 4000e stik

Elektrisk navmotor

Elektrisk navmotor

Navlås på navmotor
Scoopie
Scoopie

Akslen er monteret i svinggaflen nedefra
EVT 168
EVT 168

Akslen er monteret i svinggaflen nedefra
EVT 168
EVT 168

Grace One
Billeder af køretøjer med ikke-navmotor
Ikke sikker på hvad vi skal kaldes de her motorer men det placeres på et reduktionsgear/differentiale på bagakslen.
Motoren er her placeret væk fra baghjulet og kraften overføres gennem transmissionen.
Transmissionen kan bestå af 1 rem som på Peugeot e-Vivacity.
Eller 2 remme som på eGO Helio.
Eller en rem og reduktionsgear som på Peugeot Scoot'elec.

















Motoren er her placeret væk fra baghjulet og kraften overføres gennem transmissionen.
Transmissionen kan bestå af 1 rem som på Peugeot e-Vivacity.
Eller 2 remme som på eGO Helio.
Eller en rem og reduktionsgear som på Peugeot Scoot'elec.












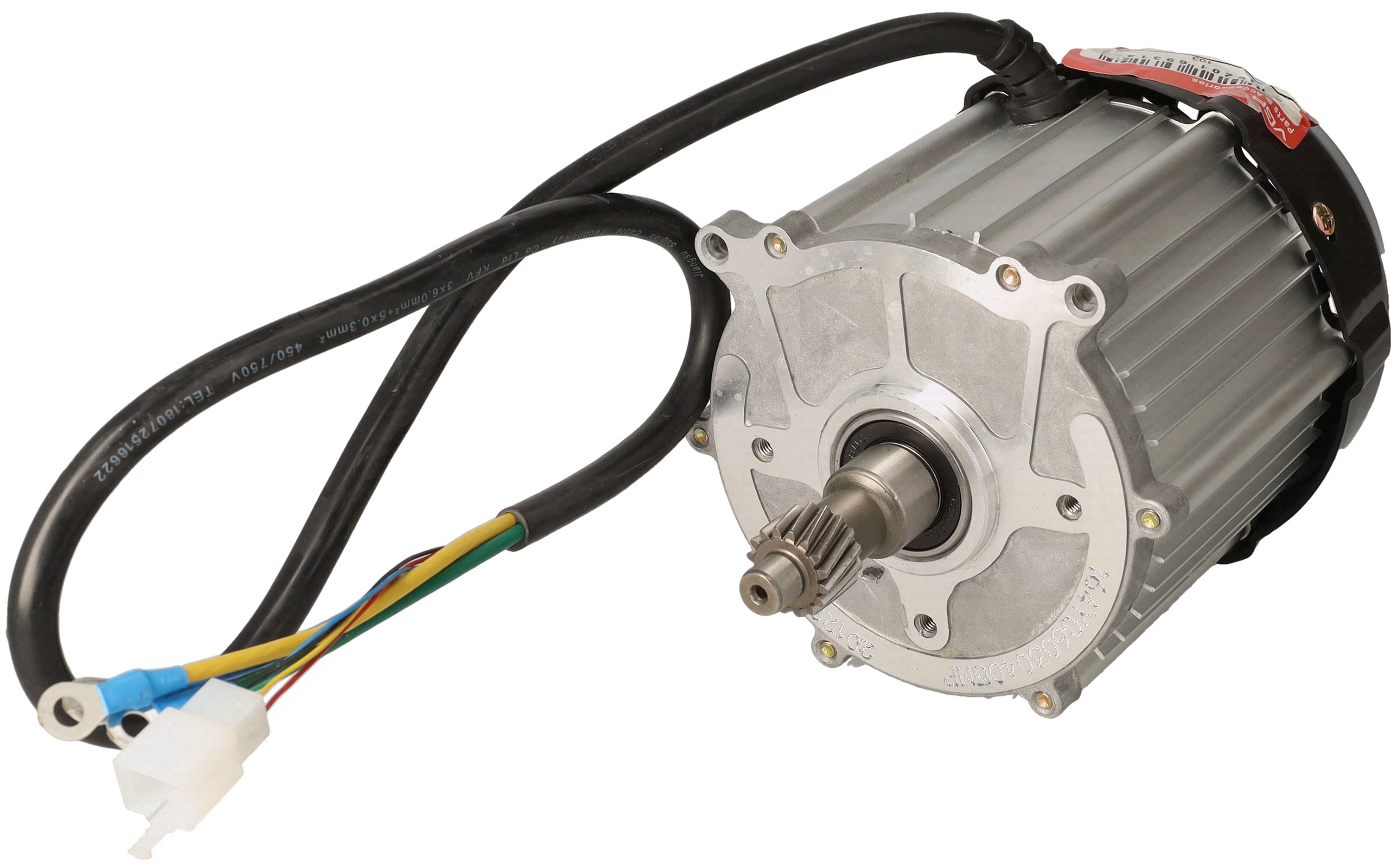




Billeder af køretøjer med centerplaceret motor

centerplaceret motor

centerplaceret motor

leroy somer elektrisk motor
Peugeot Scoot'elec
Peugeot Scoot'elec

elektrisk motor
Peugeot e-Vivacity
Peugeot e-Vivacity

elektrisk motor
Peugeot e-Vivacity
Peugeot e-Vivacity

Shang Wei SWM1LM motor
SWAP 2
SWAP 2

Shang Wei SWM1LM motor
SWAP 2
SWAP 2

SWAP 2

Govecs scooter motor

Govecs tandrem

elektrisk motor eGO Helio

eGO Helio 2 remme

eGO Helio rem
Billeder af motor med kulbørster

Elektrisk motor hub hjul

Elektrisk motor hub hjul
8 kulbørster
8 kulbørster

kulbørster elektrisk motor hub hjul adskilt
8 kulbørster
8 kulbørster

kommutator elektrisk motor hub hjul adskilt

knækket børster på elektrisk motor
8 kulbørster hvoraf nogle af dem er knækket
8 kulbørster hvoraf nogle af dem er knækket

elektrisk motor eGO Helio
Motor med kulbørster
Motor med kulbørster

elektrisk motor eGO Helio
Motor med kulbørster
Motor med kulbørster

Peugeot Scoot'elec
Elektrisk motor
Elektrisk motor

Peugeot Scoot'elec
Elektrisk motor
1 af 4 kulbørster afmonteret
Elektrisk motor
1 af 4 kulbørster afmonteret

Kulbørster
Den til venstre er ny. Den til højre er slidt
Den til venstre er ny. Den til højre er slidt

Kulbørsteholder som kan skrues ud for at skifte en af kulbørsterne
Kulbørster
Der findes motorer med og uden kulbørster.
Kulbørster slides og skal med tiden udskiftes.
Der kan f.eks. være 4 eller 8 kulbørster.
En motor med kulbørster overfører elektricitet gennem kulbørsterne til kommutatoren som på rotoren har forbindelse til spolerne.
Kulbørsterne rammer det der kaldes kommutatoren.
På engelsk kaldes børsteløs for "brushless".
Kulbørster slides og skal med tiden udskiftes.
Der kan f.eks. være 4 eller 8 kulbørster.
En motor med kulbørster overfører elektricitet gennem kulbørsterne til kommutatoren som på rotoren har forbindelse til spolerne.
Kulbørsterne rammer det der kaldes kommutatoren.
Motoreffekt (watt)
Motoren kan f.eks. have en effekt på 700, 1000, 1500 eller 2500 watt.
Effekten fortæller om motorens strømforbrug.
Der kan oplyses to forskellige motoreffekter.
Et nominel forbrug og et maksimum forbrug.
En motor kan være oplyst som 800 watt (nominel) og 1600 watt (maksimum).
Så vidt jeg ved betyder det at motoren ved almindelig vandret kørsel bruger 800 watt og ved acceleration eller kørsel op ad bakke kan strømbruget komme op på højst 1600 watt.
Ved mange scootere oplyses kun ét tal ved motoreffekten og der oplyses ikke altid om det er den nominelle eller maksimale effekt.
Effekten fortæller om motorens strømforbrug.
Der kan oplyses to forskellige motoreffekter.
Et nominel forbrug og et maksimum forbrug.
På engelsk kaldes nominel forbrug for "rated".
En motor kan være oplyst som 800 watt (nominel) og 1600 watt (maksimum).
Så vidt jeg ved betyder det at motoren ved almindelig vandret kørsel bruger 800 watt og ved acceleration eller kørsel op ad bakke kan strømbruget komme op på højst 1600 watt.
Ved mange scootere oplyses kun ét tal ved motoreffekten og der oplyses ikke altid om det er den nominelle eller maksimale effekt.
Hallsensorer
I børsteløse motorer findes elektronik som kaldes "hallsensor", "hall effekt sensor" eller "hall switch".
Hallsensorerne register rotorens position.
Altså hvordan baghjulet er drejet.
Hallsensorerne er elektrisk forbundet med controlleren.
Med information fra hallsensorerne ved controlleren hvilken faseledning/spole i motoren der skal have strøm.
Stikket til hallsensorerne har gerne 5 meget tynde ledninger.
Det ser ud til at der altid er 3 styks hallsensorer.
De 3 hallsensorer får f.eks. +5 eller +12 volt (rød) og stelforbindelse (sort).
Og så giver hver hallsensor signal til controlleren.




Hallsensorerne register rotorens position.
Altså hvordan baghjulet er drejet.
Hallsensorerne er elektrisk forbundet med controlleren.
Med information fra hallsensorerne ved controlleren hvilken faseledning/spole i motoren der skal have strøm.
Stikket til hallsensorerne har gerne 5 meget tynde ledninger.
Det ser ud til at der altid er 3 styks hallsensorer.
De 3 hallsensorer får f.eks. +5 eller +12 volt (rød) og stelforbindelse (sort).
Og så giver hver hallsensor signal til controlleren.

tre hallsensorer i motor

tre hallsensorer i motor

hallsensor

hallsensor forbindelser
Regenerativ bremsning
Regenerativ bremsning (forkortet "regen") er når motoren bruges til at genoplade batteriet.
Nogle elektriske køretøjer er i stand til at oplade batteriet når motorbremsen er i funktion.
Motorbremsen er i funktion når en af bremsekontakterne aktiveres.
F.eks. når man kommer kørende og giver slip på farthåndtaget og aktiverer en af bremsekontakterne ved at klemme lidt på et af bremsegrebene eller ved at slå sidestøttebenet ud.
Så vil motoren give modstand og fungerer som en dynamo/generator som laver elektricitet til opladning af batteriet.
Hvis det ikke er nødvendigt at bremse hurtigt så kan man nøjes med at bruge motorbremsen i stedet for forbremsen og bagbremsen.
På den måde kan man genvinde noget af energien der ikke ville gå tabt og opnå en smule længere rækkevidde.
Nogle elektriske køretøjer er i stand til at oplade batteriet når motorbremsen er i funktion.
Motorbremsen er i funktion når en af bremsekontakterne aktiveres.
F.eks. når man kommer kørende og giver slip på farthåndtaget og aktiverer en af bremsekontakterne ved at klemme lidt på et af bremsegrebene eller ved at slå sidestøttebenet ud.
Så vil motoren give modstand og fungerer som en dynamo/generator som laver elektricitet til opladning af batteriet.
Hvis det ikke er nødvendigt at bremse hurtigt så kan man nøjes med at bruge motorbremsen i stedet for forbremsen og bagbremsen.
På den måde kan man genvinde noget af energien der ikke ville gå tabt og opnå en smule længere rækkevidde.
Momentplade
Disse momentplader (eller hvad de kaldes) bruges vist til at styrke det sted hvor motoren vrider i stellet så ikke det med tiden bøjer.




Momentplade til at holde baghjulsaksel

Elektrisk scooter baghjul svingarm

Elektrisk scooter baghjul
Ledninger
Kablet i en børsteløs motor kan være forbundet til controlleren gennem 3 tykke ledninger og 5 meget tynde ledninger.
De 3 tykke ledninger er faseledninger.
De 5 meget tynde ledninger er hallsensorledninger.
Kablet kan komme ud af motoren i en udhulet aksel.




De 3 tykke ledninger er faseledninger.
De 5 meget tynde ledninger er hallsensorledninger.
Kablet kan komme ud af motoren i en udhulet aksel.

eldiagram med hallsensorer

ledninger fra motor

Motorkabel
Ebretti 518
Ebretti 518

Motorkabel
Scoopie
Scoopie
Temperatursensor
I nogle motorer kan der være en temperatursensor som har forbindelse til controlleren sammen med ledningerne til hallsensorene.
Billeder af køretøjer med mere end én motor
De findes elektriske scootere med mere end én motor.
F.eks. UBCO 2X2 Adventure Bike, PGO PSE og UGBEST Cabin-E3.

UBCO 2X2 Adventure Bike
PGO PSE
PGO PSE

VGA CabEasy Exclusive
VGA CabEasy Exclusive
Fønix Moza
F.eks. UBCO 2X2 Adventure Bike, PGO PSE og UGBEST Cabin-E3.

UBCO 2X2 Adventure Bike

PGO PSE

PGO PSE

Venstre motor
VGA CabEasy Exclusive
VGA CabEasy Exclusive

VGA CabEasy Exclusive

VGA CabEasy Exclusive

Fønix Moza